The past year and a half we have put a large amount of effort into rebuilding the Serval Mesh application from the inside out, to include end-to-end encryption, integrated short-messaging and resilient file sharing, all made much, much more useful by a completely overhauled user interface.
Therefore it is with great pleasure that I announce our first release candidate for version 0.90 of the Serval Mesh.
This has only been possible due to the outstanding efforts, including during some difficult times, of our core team (in alphabetic order): Andrew Bettison, Romana Challans, Jeremy Lakeman and Corey Wallis.
To get an idea of the extent of changes, take a look at the release notes and related documents. Changes include:
If you have used version 0.08, you will notice these changes:
What we need now is for people to download and test this release candidate, and report any issues they encounter.
For more information, visit the Serval wiki page for this release candidate.
Update: see a video of us using 0.90RC1 here.
Therefore it is with great pleasure that I announce our first release candidate for version 0.90 of the Serval Mesh.
This has only been possible due to the outstanding efforts, including during some difficult times, of our core team (in alphabetic order): Andrew Bettison, Romana Challans, Jeremy Lakeman and Corey Wallis.
To get an idea of the extent of changes, take a look at the release notes and related documents. Changes include:
If you have used version 0.08, you will notice these changes:
- A completely redesigned human interface.
- A much smaller APK; faster to download and install.
- No need for third-party apps like SMSDroid or WebSMS.
The main screen now presents nine buttons:
- Call to make voice calls
- Messages to compose and view messages
- Contacts to discover nearby phones on the Mesh and show your Contact List
- Maps calls up the Serval Maps interface (if installed)
- Share files to send files via the Rhizome file-distribution system, list and view received files, see how much storage you are using
- Share Us to give the Serval Mesh software to other users with compatible Android devices
- Settings to adjust settings (see below)
- Switch Off(On) to stop or start Serval Mesh
- Help for instructions and information
The help system is more detailed and complete:
- Guide To Interface explains the buttons on the main screen
- Accounts & Contacts explains how Serval Mesh identifies you and other users to each other
- Licence is the full text of the software licence
- Serval Security describes Serval's security features, Android permissions used, and the Privacy Policy
- About introduces the Serval Project and leads to the Donate button
- Quick Links contains some useful links for further reading
- Serval Version is the full text of these release notes
The Settings menu has been overhauled:
- Wifi Settings lets you examine and change Wi-Fi settings
- Accounts Management lets you change your Serval Mesh phone number and name
- View Logs shows a log of recent software activity
- Redetect Wifi redetects the device's Wi-Fi chipset
There have been enormous changes under the hood:
- The foundations of the Serval Security Framework are now in place. Elliptic curve cryptography is used for identifying, protecting and authenticating subscribers and mesh network traffic.
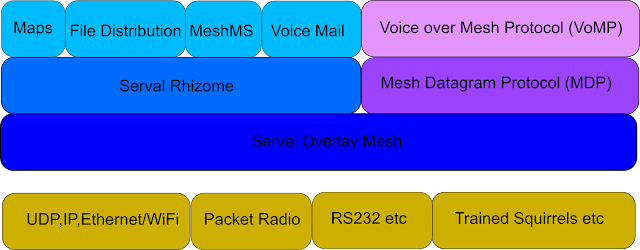
- All Serval-to-Serval traffic (except Rhizome transfers) is now encapsulated in Serval's new, secure Mesh Datagram Protocol, implemented as an overlay network on standard IP over Wi-Fi.
- The original Java implementation of the Rhizome file sharing system has been superseded by a new implementation in C within the serval-dna component, using SQLite as the local storage engine.
- Voice calls are now carried over the mesh using Serval's own Voice over Mesh Protocol, which has been designed to replace SIPand RTP. As a result, call quality and latency have improved.
- Improved stability and responsiveness.
What we need now is for people to download and test this release candidate, and report any issues they encounter.
For more information, visit the Serval wiki page for this release candidate.
Update: see a video of us using 0.90RC1 here.